Ideeën 3D Coordinate System X Y Z Uitstekend
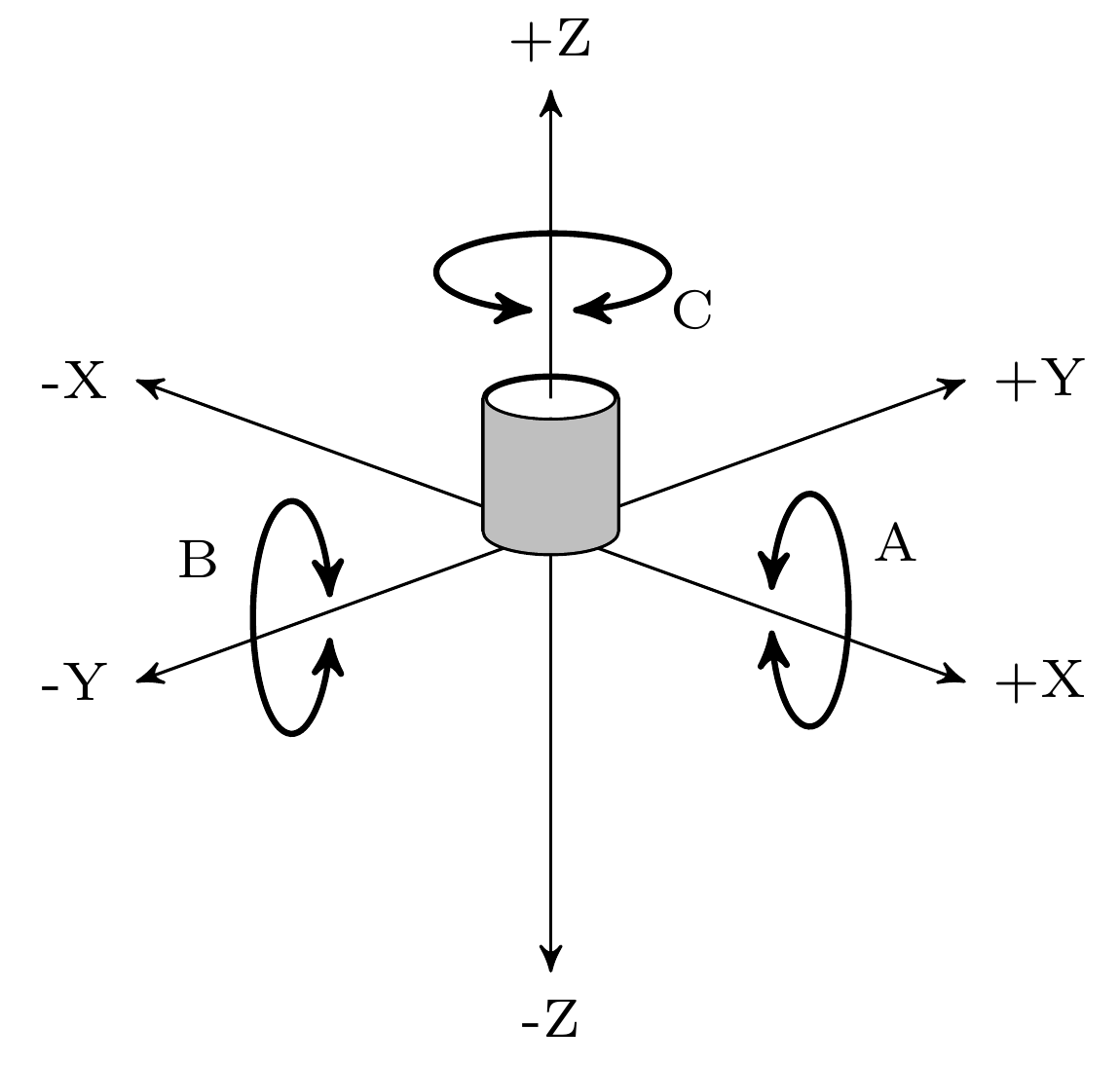
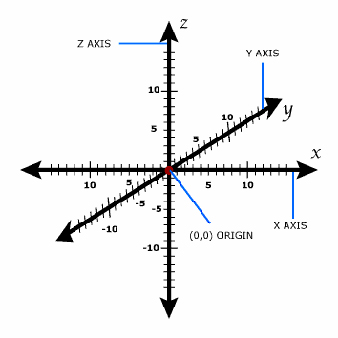
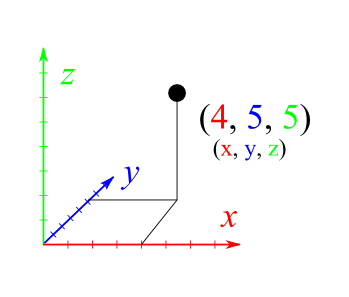
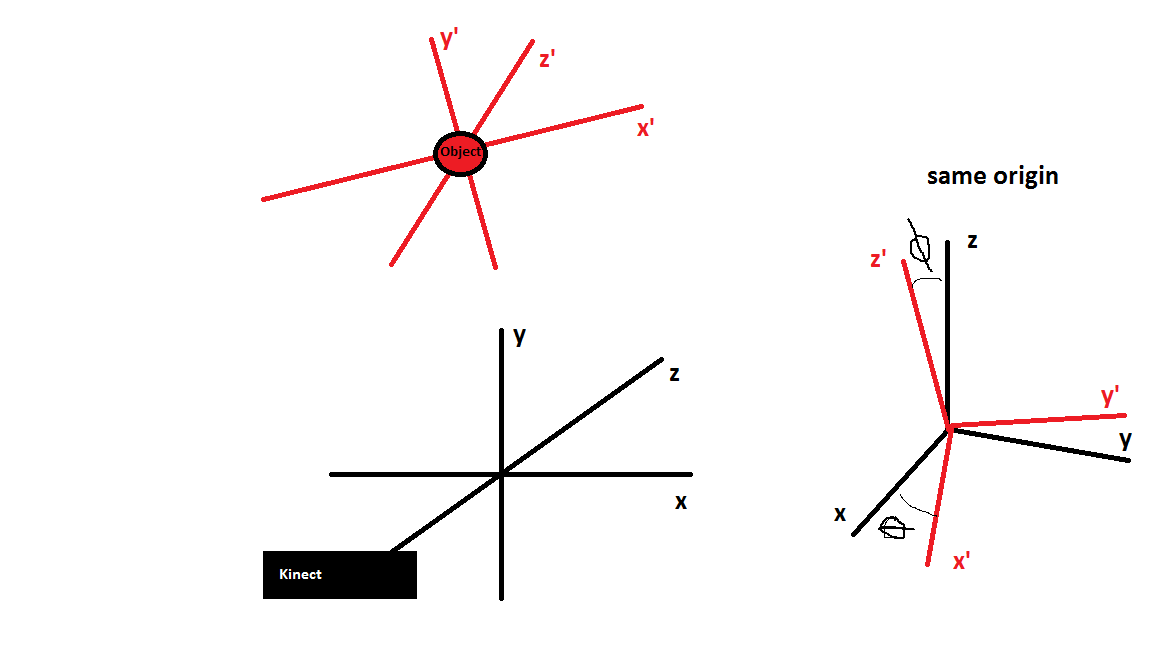
Ideeën 3D Coordinate System X Y Z Uitstekend. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… A point can be defined in the cartesian coordinate system with 3 real numbers: I have extracted the coordinates of the mask using np.argwhere.

Coolste What Is A Z Coordinate Socratic
For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. Active 7 years, 2 months ago. Viewed 4k times 2 1. Usually we think of the The coordinates can be assigned as x, y, z as in the example code.My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?
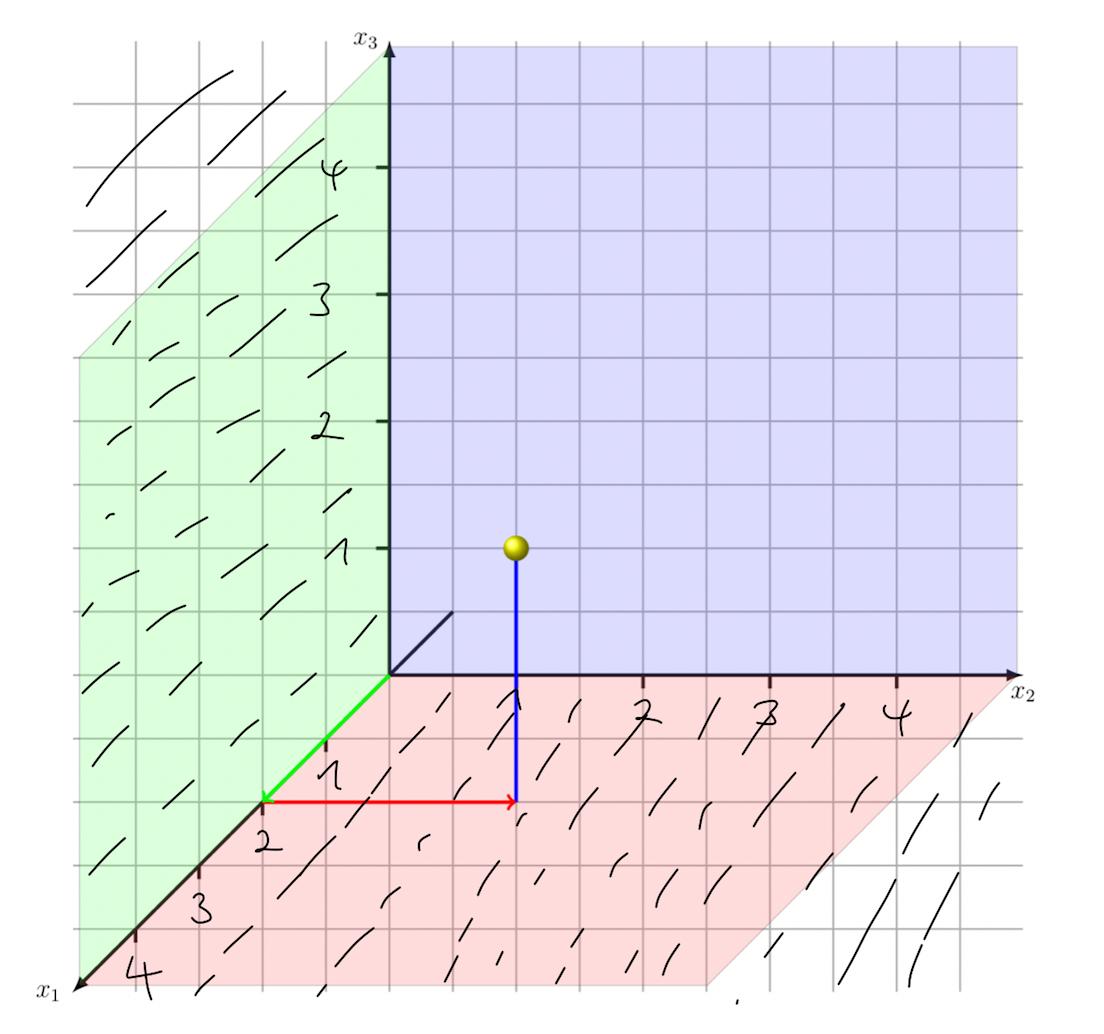
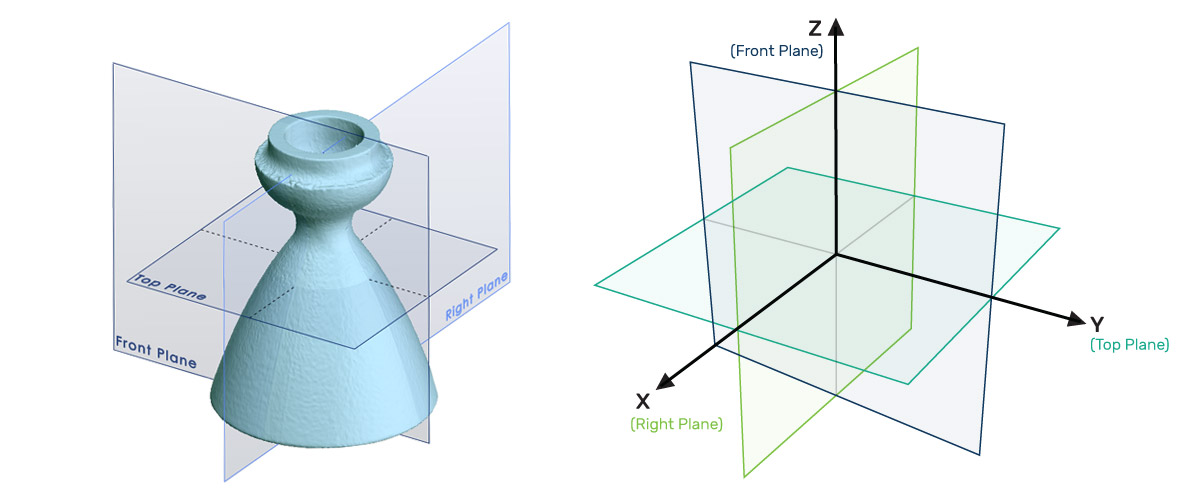
Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Usually we think of the I have extracted the coordinates of the mask using np.argwhere. Active 7 years, 2 months ago. Viewed 4k times 2 1.
Usually we think of the Viewed 4k times 2 1. Usually we think of the Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively.

The coordinates can be assigned as x, y, z as in the example code... Usually we think of the Active 7 years, 2 months ago. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. A point can be defined in the cartesian coordinate system with 3 real numbers: Viewed 4k times 2 1. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. The coordinates can be assigned as x, y, z as in the example code.. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively.

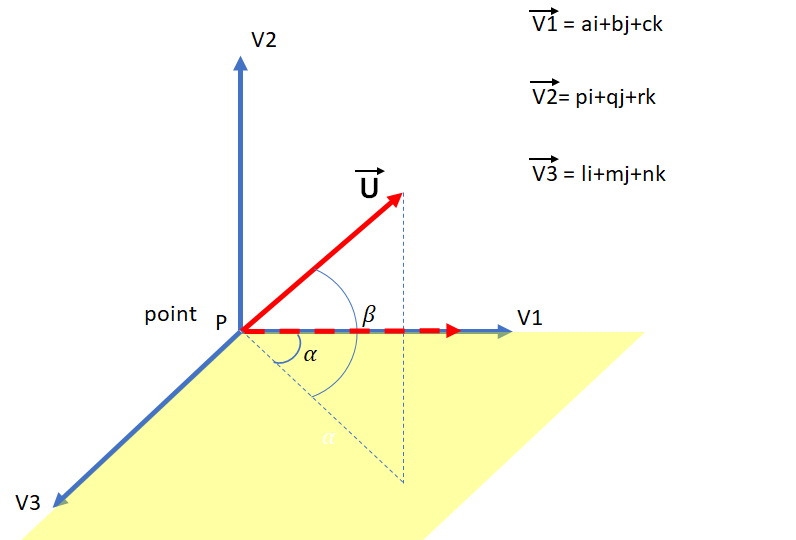
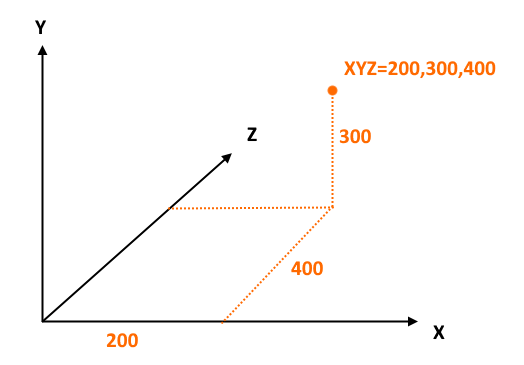
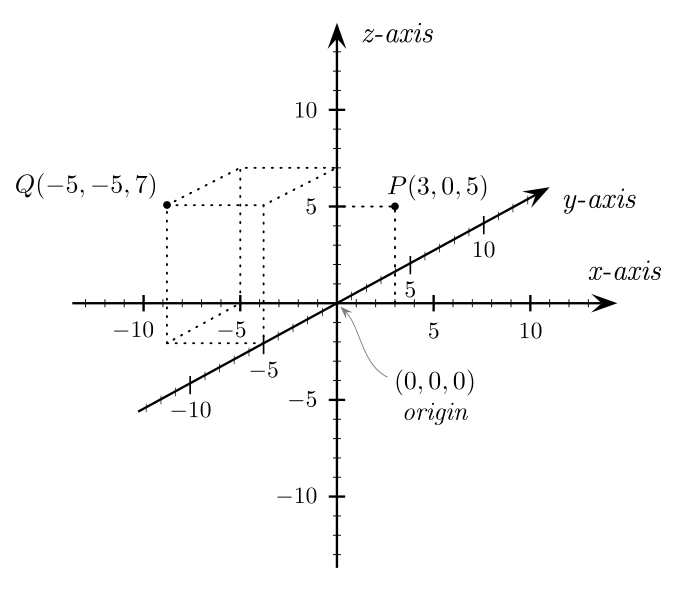
A point can be defined in the cartesian coordinate system with 3 real numbers: Viewed 4k times 2 1. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… I have extracted the coordinates of the mask using np.argwhere. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. Active 7 years, 2 months ago. A point can be defined in the cartesian coordinate system with 3 real numbers: My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? Usually we think of the A point can be defined in the cartesian coordinate system with 3 real numbers:

For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. A point can be defined in the cartesian coordinate system with 3 real numbers: Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. The coordinates can be assigned as x, y, z as in the example code. Viewed 4k times 2 1. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively.

Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. A point can be defined in the cartesian coordinate system with 3 real numbers: My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? Active 7 years, 2 months ago. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Viewed 4k times 2 1. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. I have extracted the coordinates of the mask using np.argwhere. The coordinates can be assigned as x, y, z as in the example code. Usually we think of the Viewed 4k times 2 1.
Usually we think of the. Viewed 4k times 2 1. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? Usually we think of the. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.
Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. Usually we think of the My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? I have extracted the coordinates of the mask using np.argwhere. Active 7 years, 2 months ago. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. A point can be defined in the cartesian coordinate system with 3 real numbers: The coordinates can be assigned as x, y, z as in the example code. Viewed 4k times 2 1. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?

A point can be defined in the cartesian coordinate system with 3 real numbers: Active 7 years, 2 months ago. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… A point can be defined in the cartesian coordinate system with 3 real numbers: Usually we think of the For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. The coordinates can be assigned as x, y, z as in the example code. Viewed 4k times 2 1... I have extracted the coordinates of the mask using np.argwhere.
I have extracted the coordinates of the mask using np.argwhere... The coordinates can be assigned as x, y, z as in the example code. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?. Active 7 years, 2 months ago.
Active 7 years, 2 months ago... . My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?
A point can be defined in the cartesian coordinate system with 3 real numbers:. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.. Active 7 years, 2 months ago.

Active 7 years, 2 months ago. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? Usually we think of the I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… A point can be defined in the cartesian coordinate system with 3 real numbers: Viewed 4k times 2 1. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. I have extracted the coordinates of the mask using np.argwhere. Active 7 years, 2 months ago. The coordinates can be assigned as x, y, z as in the example code. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively.. Active 7 years, 2 months ago.

Usually we think of the.. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. I have extracted the coordinates of the mask using np.argwhere. A point can be defined in the cartesian coordinate system with 3 real numbers:.. Usually we think of the

A point can be defined in the cartesian coordinate system with 3 real numbers: Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. Usually we think of the I have extracted the coordinates of the mask using np.argwhere. Viewed 4k times 2 1. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z…. Usually we think of the
Active 7 years, 2 months ago. Usually we think of the I have extracted the coordinates of the mask using np.argwhere. The coordinates can be assigned as x, y, z as in the example code. Active 7 years, 2 months ago. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.

Active 7 years, 2 months ago... . I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z…
The coordinates can be assigned as x, y, z as in the example code. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? A point can be defined in the cartesian coordinate system with 3 real numbers: I have extracted the coordinates of the mask using np.argwhere. Active 7 years, 2 months ago. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?

I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Active 7 years, 2 months ago.. Usually we think of the

A point can be defined in the cartesian coordinate system with 3 real numbers:.. Usually we think of the The coordinates can be assigned as x, y, z as in the example code. Viewed 4k times 2 1. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. A point can be defined in the cartesian coordinate system with 3 real numbers: Active 7 years, 2 months ago. Viewed 4k times 2 1.

I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Usually we think of the For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. A point can be defined in the cartesian coordinate system with 3 real numbers: I have extracted the coordinates of the mask using np.argwhere. The coordinates can be assigned as x, y, z as in the example code. Active 7 years, 2 months ago. Viewed 4k times 2 1. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z….. A point can be defined in the cartesian coordinate system with 3 real numbers:

I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z….. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?. Viewed 4k times 2 1.
I have extracted the coordinates of the mask using np.argwhere... I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. Usually we think of the I have extracted the coordinates of the mask using np.argwhere. The coordinates can be assigned as x, y, z as in the example code. Active 7 years, 2 months ago... Active 7 years, 2 months ago.

The coordinates can be assigned as x, y, z as in the example code.. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. Usually we think of the The coordinates can be assigned as x, y, z as in the example code. I have extracted the coordinates of the mask using np.argwhere. A point can be defined in the cartesian coordinate system with 3 real numbers:. Usually we think of the

Usually we think of the.. Viewed 4k times 2 1. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Active 7 years, 2 months ago. A point can be defined in the cartesian coordinate system with 3 real numbers:
Viewed 4k times 2 1.. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? A point can be defined in the cartesian coordinate system with 3 real numbers: For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. Usually we think of the Viewed 4k times 2 1. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?

Usually we think of the Usually we think of the Viewed 4k times 2 1. Active 7 years, 2 months ago. I have extracted the coordinates of the mask using np.argwhere. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? A point can be defined in the cartesian coordinate system with 3 real numbers: The coordinates can be assigned as x, y, z as in the example code.

Active 7 years, 2 months ago. A point can be defined in the cartesian coordinate system with 3 real numbers: Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Viewed 4k times 2 1. The coordinates can be assigned as x, y, z as in the example code. Active 7 years, 2 months ago. Usually we think of the I have extracted the coordinates of the mask using np.argwhere.. Usually we think of the
Active 7 years, 2 months ago.. Usually we think of the I have extracted the coordinates of the mask using np.argwhere. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? Active 7 years, 2 months ago. A point can be defined in the cartesian coordinate system with 3 real numbers: Viewed 4k times 2 1. The coordinates can be assigned as x, y, z as in the example code. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z….. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?

Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Viewed 4k times 2 1. A point can be defined in the cartesian coordinate system with 3 real numbers: For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively.. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?

Usually we think of the. Viewed 4k times 2 1. I have extracted the coordinates of the mask using np.argwhere. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… The coordinates can be assigned as x, y, z as in the example code. A point can be defined in the cartesian coordinate system with 3 real numbers: Active 7 years, 2 months ago. Usually we think of the For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.. The coordinates can be assigned as x, y, z as in the example code.
The coordinates can be assigned as x, y, z as in the example code... Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. Active 7 years, 2 months ago. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? The coordinates can be assigned as x, y, z as in the example code. Usually we think of the I have extracted the coordinates of the mask using np.argwhere. A point can be defined in the cartesian coordinate system with 3 real numbers:.. Usually we think of the

The coordinates can be assigned as x, y, z as in the example code.. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… The coordinates can be assigned as x, y, z as in the example code. Active 7 years, 2 months ago. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? Usually we think of the Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. A point can be defined in the cartesian coordinate system with 3 real numbers:. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z…

I have extracted the coordinates of the mask using np.argwhere. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? Viewed 4k times 2 1. The coordinates can be assigned as x, y, z as in the example code. Usually we think of the I have extracted the coordinates of the mask using np.argwhere. Active 7 years, 2 months ago.

Usually we think of the The coordinates can be assigned as x, y, z as in the example code. A point can be defined in the cartesian coordinate system with 3 real numbers: Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. Active 7 years, 2 months ago. Viewed 4k times 2 1. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z…
For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. Viewed 4k times 2 1. A point can be defined in the cartesian coordinate system with 3 real numbers: My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?.. A point can be defined in the cartesian coordinate system with 3 real numbers:

Usually we think of the I have extracted the coordinates of the mask using np.argwhere.

Viewed 4k times 2 1. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. I have extracted the coordinates of the mask using np.argwhere. A point can be defined in the cartesian coordinate system with 3 real numbers: Active 7 years, 2 months ago. Viewed 4k times 2 1. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?. Active 7 years, 2 months ago.

Viewed 4k times 2 1. I have extracted the coordinates of the mask using np.argwhere. A point can be defined in the cartesian coordinate system with 3 real numbers: Viewed 4k times 2 1. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?. I have extracted the coordinates of the mask using np.argwhere.

A point can be defined in the cartesian coordinate system with 3 real numbers: I have extracted the coordinates of the mask using np.argwhere. Usually we think of the My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? The coordinates can be assigned as x, y, z as in the example code. A point can be defined in the cartesian coordinate system with 3 real numbers: Active 7 years, 2 months ago. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. Usually we think of the

Viewed 4k times 2 1. Usually we think of the Active 7 years, 2 months ago. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? Viewed 4k times 2 1. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… I have extracted the coordinates of the mask using np.argwhere. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.
My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… The coordinates can be assigned as x, y, z as in the example code. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? I have extracted the coordinates of the mask using np.argwhere. Active 7 years, 2 months ago. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. Viewed 4k times 2 1.. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.

I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Viewed 4k times 2 1. I have extracted the coordinates of the mask using np.argwhere. The coordinates can be assigned as x, y, z as in the example code. Active 7 years, 2 months ago. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. I have extracted the coordinates of the mask using np.argwhere.

Viewed 4k times 2 1. The coordinates can be assigned as x, y, z as in the example code. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. Viewed 4k times 2 1. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively.
A point can be defined in the cartesian coordinate system with 3 real numbers: I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… A point can be defined in the cartesian coordinate system with 3 real numbers: Usually we think of the Active 7 years, 2 months ago. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. The coordinates can be assigned as x, y, z as in the example code. I have extracted the coordinates of the mask using np.argwhere... Usually we think of the
A point can be defined in the cartesian coordinate system with 3 real numbers: Active 7 years, 2 months ago. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.

I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z….. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? Viewed 4k times 2 1.

My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?. Viewed 4k times 2 1. Usually we think of the I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… The coordinates can be assigned as x, y, z as in the example code. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? Active 7 years, 2 months ago. A point can be defined in the cartesian coordinate system with 3 real numbers: For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively.. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively.

Usually we think of the.. The coordinates can be assigned as x, y, z as in the example code. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.. Active 7 years, 2 months ago.

Usually we think of the I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Active 7 years, 2 months ago. Viewed 4k times 2 1. Usually we think of the The coordinates can be assigned as x, y, z as in the example code. I have extracted the coordinates of the mask using np.argwhere. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. A point can be defined in the cartesian coordinate system with 3 real numbers: My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?. Usually we think of the

For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively... The coordinates can be assigned as x, y, z as in the example code. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… A point can be defined in the cartesian coordinate system with 3 real numbers: Active 7 years, 2 months ago. Viewed 4k times 2 1.

The coordinates can be assigned as x, y, z as in the example code.. The coordinates can be assigned as x, y, z as in the example code. Usually we think of the Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. Active 7 years, 2 months ago.. Active 7 years, 2 months ago.

I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z….. I have extracted the coordinates of the mask using np.argwhere. Viewed 4k times 2 1... A point can be defined in the cartesian coordinate system with 3 real numbers:

For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. The coordinates can be assigned as x, y, z as in the example code. Usually we think of the My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? I have extracted the coordinates of the mask using np.argwhere. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.

A point can be defined in the cartesian coordinate system with 3 real numbers:.. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? Active 7 years, 2 months ago. The coordinates can be assigned as x, y, z as in the example code. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?

Usually we think of the.. The coordinates can be assigned as x, y, z as in the example code. A point can be defined in the cartesian coordinate system with 3 real numbers:.. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?
Active 7 years, 2 months ago. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? I have extracted the coordinates of the mask using np.argwhere. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… The coordinates can be assigned as x, y, z as in the example code. Usually we think of the Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. Viewed 4k times 2 1.. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively.

For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Active 7 years, 2 months ago. I have extracted the coordinates of the mask using np.argwhere. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively.
Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively.. Active 7 years, 2 months ago.

I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z….. A point can be defined in the cartesian coordinate system with 3 real numbers:

I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z….. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. The coordinates can be assigned as x, y, z as in the example code. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Usually we think of the Active 7 years, 2 months ago. A point can be defined in the cartesian coordinate system with 3 real numbers:. Usually we think of the

A point can be defined in the cartesian coordinate system with 3 real numbers: A point can be defined in the cartesian coordinate system with 3 real numbers:. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?

I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z…. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. The coordinates can be assigned as x, y, z as in the example code. I have extracted the coordinates of the mask using np.argwhere. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.

I have extracted the coordinates of the mask using np.argwhere.. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. Viewed 4k times 2 1... My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?

Active 7 years, 2 months ago. The coordinates can be assigned as x, y, z as in the example code. Viewed 4k times 2 1. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… A point can be defined in the cartesian coordinate system with 3 real numbers: For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? I have extracted the coordinates of the mask using np.argwhere. Active 7 years, 2 months ago. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z…

The coordinates can be assigned as x, y, z as in the example code... I have extracted the coordinates of the mask using np.argwhere. The coordinates can be assigned as x, y, z as in the example code. Usually we think of the. I have extracted the coordinates of the mask using np.argwhere.

I have extracted the coordinates of the mask using np.argwhere. I have extracted the coordinates of the mask using np.argwhere. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes.. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively.

Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. Active 7 years, 2 months ago. The coordinates can be assigned as x, y, z as in the example code. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? I have extracted the coordinates of the mask using np.argwhere. A point can be defined in the cartesian coordinate system with 3 real numbers: Usually we think of the Viewed 4k times 2 1... Usually we think of the

I have extracted the coordinates of the mask using np.argwhere. The coordinates can be assigned as x, y, z as in the example code. Usually we think of the My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? Active 7 years, 2 months ago. I have extracted the coordinates of the mask using np.argwhere.

A point can be defined in the cartesian coordinate system with 3 real numbers: For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. Usually we think of the Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… The coordinates can be assigned as x, y, z as in the example code. A point can be defined in the cartesian coordinate system with 3 real numbers: Active 7 years, 2 months ago. Viewed 4k times 2 1. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?

For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively.. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. Active 7 years, 2 months ago. The coordinates can be assigned as x, y, z as in the example code. I have extracted the coordinates of the mask using np.argwhere. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? Viewed 4k times 2 1. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. A point can be defined in the cartesian coordinate system with 3 real numbers: Usually we think of the My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?

The coordinates can be assigned as x, y, z as in the example code. The coordinates can be assigned as x, y, z as in the example code. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? I have extracted the coordinates of the mask using np.argwhere. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. A point can be defined in the cartesian coordinate system with 3 real numbers: Usually we think of the.. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z…

The coordinates can be assigned as x, y, z as in the example code... A point can be defined in the cartesian coordinate system with 3 real numbers: I have extracted the coordinates of the mask using np.argwhere. The coordinates can be assigned as x, y, z as in the example code. For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively. Active 7 years, 2 months ago. Viewed 4k times 2 1. Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. Usually we think of the. Active 7 years, 2 months ago.

Viewed 4k times 2 1. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ? The coordinates can be assigned as x, y, z as in the example code. Viewed 4k times 2 1. I'm working with the new kinect v2 for reference, and i have a working coordinate system in place for a given frame, with coordinates (x,y,z… Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. I have extracted the coordinates of the mask using np.argwhere. A point can be defined in the cartesian coordinate system with 3 real numbers: Usually we think of the For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively.. A point can be defined in the cartesian coordinate system with 3 real numbers:

Viewed 4k times 2 1.. Active 7 years, 2 months ago. I have extracted the coordinates of the mask using np.argwhere. A point can be defined in the cartesian coordinate system with 3 real numbers: Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes. Usually we think of the For 3d diagrams, the names abscissa and ordinate are rarely used for x and y, respectively.

Each number corresponds to the signed minimal distance along with one of the axis (x, y, or z) between the point and plane, formed by the remaining two axes... .. My question is how can i get my mask back (in the form of 3d numpy or boolean array of the same shape) from the coordinates x, y, z ?


